

Az ortofotó 4 csatornából áll: R, G, B, NIR. A képek központi részei kerülnek kiválasztásra a mozaik előállításhoz. A fotogrammetriailag feldolgozott felvételek ortorektifikáltak és georektifikáltak. A plannimetrikus pontosság megegyezik a GSD-vel. Az alkalmazott mozaikolási technika biztosítja a legjobb színkiegyelítést a képek között és hézegmentes mozaikolt felvételt eredményez.
Author Archives: eadmin

15
ápr
ápr
A CIR ortofotók az infravörös, vörös és zöld (IR,R,G) csatornák felvételezésével történik, ami hamis színes megjelenítésű képterméket eredményez. A képek központi részei kerülnek kiválasztásra a mozaik előállításhoz. A fotogrammetriailag feldolgozott felvételek ortorektifikáltak és georektifikáltak. A plannimetrikus pontosság megegyezik a GSD-vel. Az alkalmazott mozaikolási technika biztosítja a legjobb színkiegyelítést a képek között és hézegmentes mozaikolt felvételt eredményez.

15
ápr
ápr
A felvétel nadírban készül, RGB (látható színtartományú) csatornákat tartalmaz. A képek központi részei kerülnek kiválasztásra a mozaik előállításhoz. A fotogrammetriailag feldolgozott felvételek ortorektifikáltak és georektifikáltak. A plannimetrikus pontosság megegyezik a GSD-vel. Az alkalmazott mozaikolási technika biztosítja a legjobb színkiegyelítést a képek között és hézegmentes mozaikolt felvételt eredményez.

15
ápr
ápr
A nagy pontsűrűségű LiDAR pontfelhőből leválogatott magasfeszültségű vezetékekre illesztett vektoros vonallánc elemek és modellezett oszlopok. Távvezeték hálózatok tervezéséhez és monitoringjához.
bányászat, geodézia, környezetvédelem, termékek, topográfia, vízgazdálkodás
Domborzati pontok (grid)

15
ápr
ápr
A (LiDAR) domborzatmodell alapján generált, alacsonyabb térbeli felbontású (5,10,20 vagy 50 m) a terep magassági értékeit reprezentáló vektoros rácsháló modell.
bányászat, erdészet, geodézia, környezetvédelem, termékek, természetvédelem, vízgazdálkodás
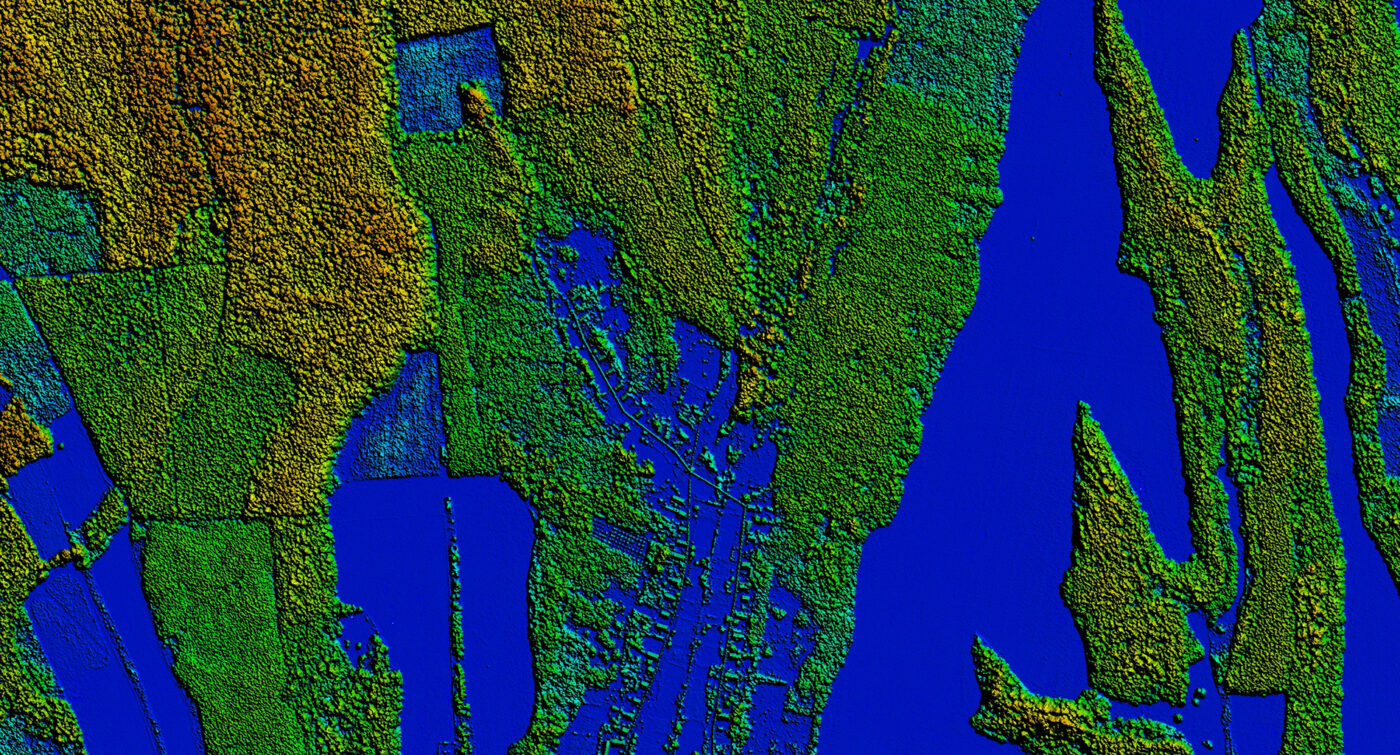
Topográfiai térképek

15
ápr
ápr
A domborzatot, felszínborítási kategóriákat, szintvonalakat együttesen ábrázoló áttekintő jellegű, raszteres formátumú térképi rétegek. A hagyományos topográfiai térképektől eltérően friss, nagy felbontású, légi távérzékelt adatokból generálva.
bányászat, erdészet, geodézia, mezőgazdaság, termékek, természetvédelem, topográfia, vízgazdálkodás
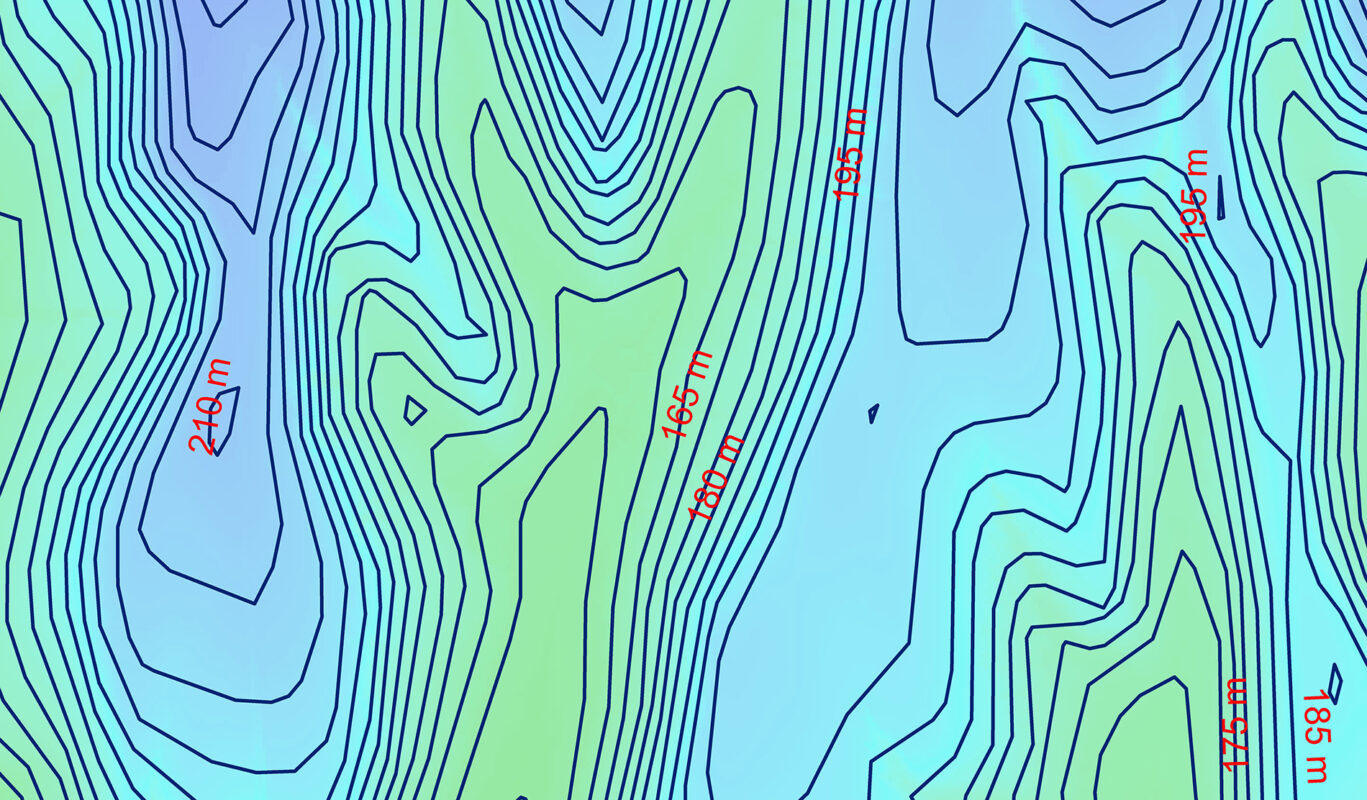
Szintvonalak
15
ápr
ápr
A (LiDAR) domborzatmodell alapján generált, a felszín azonos magasságú tereppontjait összekötő vektoros adatállomány.
beépített területek, erdészet, geodézia, környezetvédelem, termékek, természetvédelem, topográfia
Borított felszínmodell
15
ápr
ápr
A digitális felszínmodell és terepmodell különbségeként előállított, a növényzetet és épített környezet talajszinttől számított relatív magasságát reprezentáló háromdimenziós felület. A megrendelő igényeinek megfelelő vetületi rendszerben, raszteres formátumban érhető el.
bányászat, beépített területek, erdészet, geodézia, környezetvédelem, termékek, természetvédelem, topográfia, vízgazdálkodás
Digitális felszínmodell

15
ápr
ápr
Az osztályozott LiDAR pontfelhő valós felszíni pontjaiból interpolált, a növényzetet és épített környezet abszolút magasságát reprezentáló háromdimenziós felület. A megrendelő igényeinek megfelelő vetületi rendszerben, raszteres formátumban érhető el.
bányászat, beépített területek, erdészet, geodézia, környezetvédelem, mezőgazdaság, termékek, természetvédelem, topográfia, vízgazdálkodás
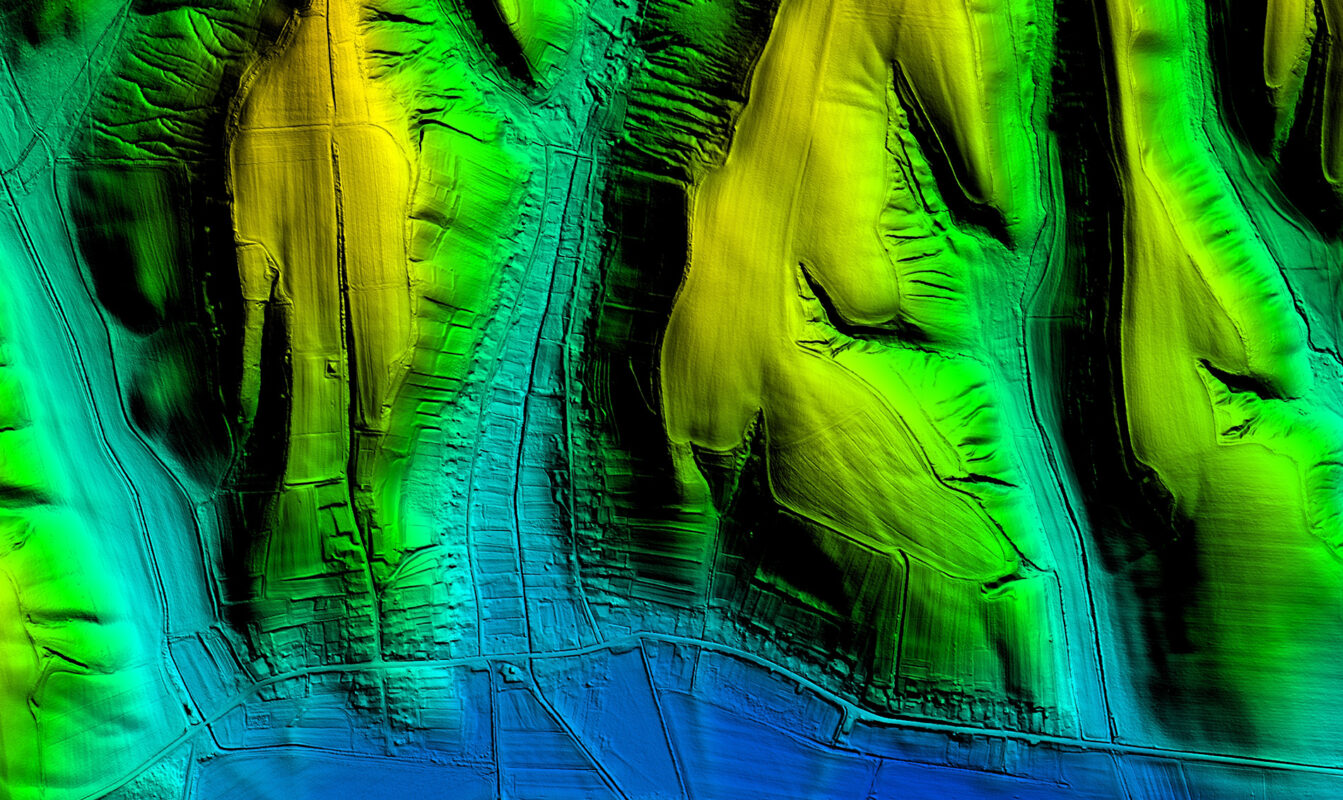
Digitális terepmodell
15
ápr
ápr
Az osztályozott LiDAR pontfelhő talaj osztályának pontjaiból interpolált, a domborzatot reprezentáló háromdimenziós felület. A megrendelő igényeinek megfelelő vetületi rendszerben, raszteres formátumban érhető el.